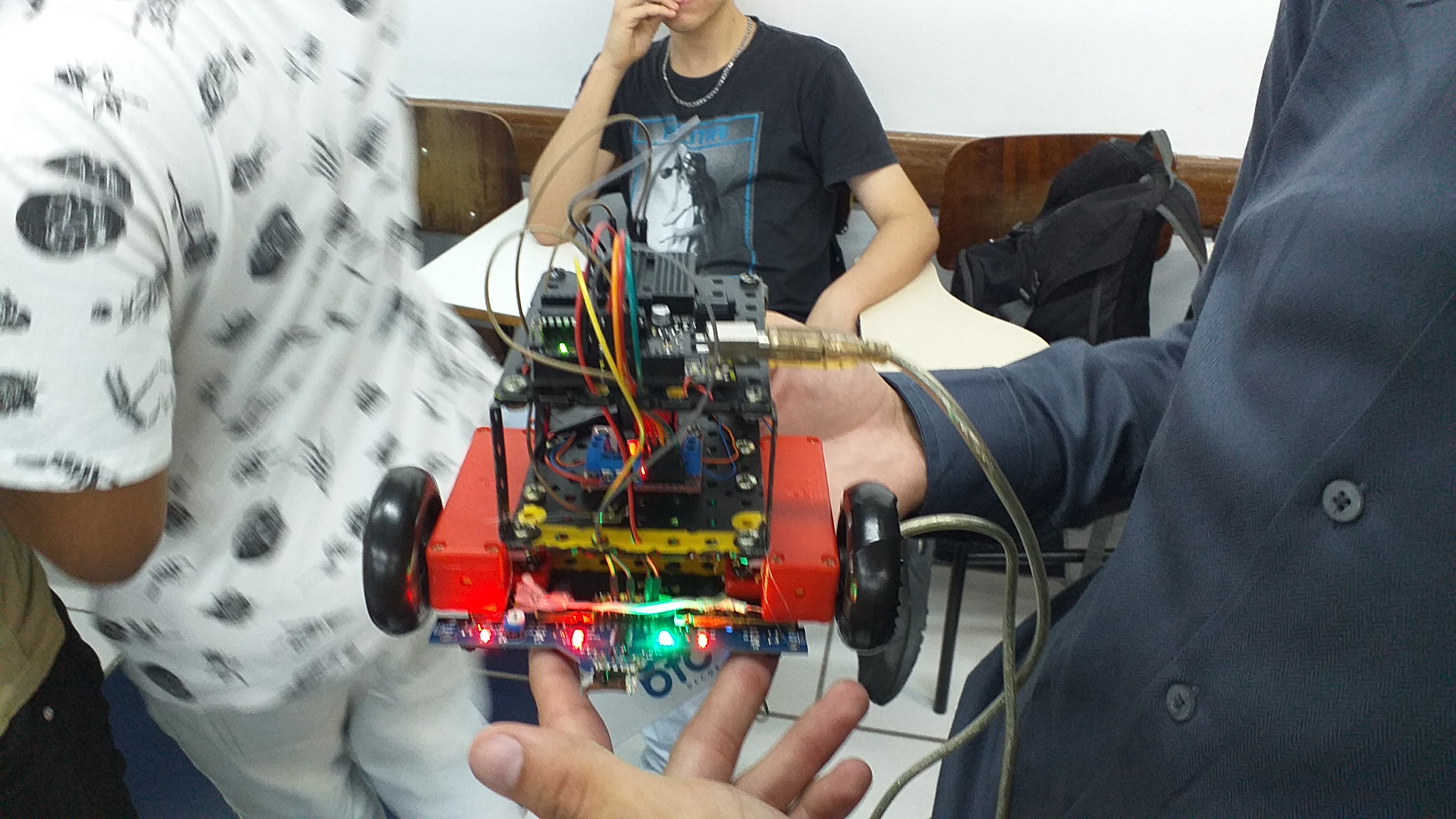
Os alunos do 2º e 3º semestre de Ciência da Computação, sob supervisão do Prof. Eduardo Furlan, docente responsável pela disciplina de “Sistemas Digitais”, construíram robôs com o auxilio da linguagem arduino.
Os grupos UnibTron e Predador contaram como foi a experiência de trabalhar com outros colegas, as principais etapas da atividade, qual robô saiu vencedor da competição e muito mais!
Nossos agradecimentos aos docentes Prof. Eduardo Furlan e Prof.ª Joyce Mendes.
Conheça os diferenciais do curso e inscreva-se já:
GRUPO UNIBTRON

Quais foram as primeiras etapas da atividade?
Nós dividimos em três etapas: criação e desenvolvimento do robô, criação do site e a produção do artigo para a Revista da Universidade Ibirapuera.
Qual foi o papel de cada membro do grupo?
Gustavo Barros Esperandino – editar vídeos
Bruno Almeida Silva – responsável pelo site
Leonardo Garruba de Araujo – programação e mídias sociais
Caique Marques Napoleão da Silva – pista e pesquisa para a construção do robô
Matheus Ferreira de Oliveira – construção do robô e programação
Gustavo Lucas Reimberg – pista e pesquisa para a construção do robô
Patricia Villa Nova de Oliveira Pinho – montagem e programação do robô
Felipe Alves da Silva – montagem e procura das peças
Marco Antonio Pereira da Silva – programação e construção do robô
Como o robô foi construído?
Planejamos nosso trabalho em etapas: analisamos os requisitos do professor, fizemos um orçamento para as peças que queríamos usar no robô e elaboramos a parte da programação e da pista. Na parte da programação tivemos muito trabalho porque não temos nenhum especialista na linguagem arduino. Depois passamos para os testes, colocamos nosso robô em provas para ver se ele seguia a linha diretamente. Corrigimos todos os bugs que tinham e chegamos no resultado esperado. Fomos campeões da competição!
O que é a linguagem arduino?
A linguagem arduino é um dialeto de C++ em que é possível montar a estrutura e declarar o que cada peça irá fazer. No decorrer do código, essas peças entram na lógica e fazem com que o robô obedeça algumas funções.
A gente usou sensores infravermelhos que enviam dados para o arduino. Em seguida, ele faz a conversão desses dados, passa o nosso código e, dependendo da condição que ele cair, vai executar um comando. Assim, ele envia para o drive “Ponte H” que passa para os motores.
Vocês tiveram gastos?
Sim. Cada membro do grupo inteirou com uma parte do dinheiro. Primeiro, fizemos todo o projeto e gastamos uma média de R$130,00 no primeiro orçamento. Fizemos um teste e percebemos que teríamos que gastar mais com sensores e rodas. Assim, gastamos em torno de R$ 300,00 no final do projeto.
Quanto tempo demorou para que o robô ficasse pronto?
Nós começamos no começo do ano, em fevereiro, e terminamos em junho. Levamos todo esse tempo porque tivemos vários problemas, como o fato de não termos um especialista em arduino. Encontramos problemas também com sensores, bateria acabando rápido e até mesmo com a lógica da programação. Tivemos que reestruturar tudo isso.
E as pistas? Como elas foram desenvolvidas?
O professor disse que cada grupo deveria fazer uma pista. Por conta de alguns problemas tivemos que mudar um pouco o nosso robô. Pensamos em uma pista rápida, mas ao mesmo tempo não muito lenta para ele. Então tivemos que fazer as curvas um pouco mais largas, mas todo o circuito para o robô saiu da nossa cabeça.
Quais materiais foram utilizados?
Usamos um papelão chamado Parana e fita contact preta.
Como o robô conseguiu se movimentar e fazer os percursos?
O legal foi que a gente conseguiu programar peça por peça, vimos o funcionamento de cada uma e como elas se encaixavam melhor. Compramos um primeiro sensor que tinha cinco módulos, ele é melhor em desempenho, mas só que para o nosso robô ele não se encaixou tão bem. Então, usamos três sensores individuais que tiveram um desempenho maior no nosso robô e na identificação da pista. A partir desses sensores, programamos, vimos a resposta deles em contato com arduino e fizemos a resposta para os motores.
O arduino dá um comando para o motor e esse comando é um sinal de 0 a 255 – escolhemos 130. O motor recebia energia da bateria e o comando do arduino, essas duas ações faziam com que o robô se movimentasse. Assim, quando ele chegava na curva, por exemplo, o sensor detectava e acelerava o motor.
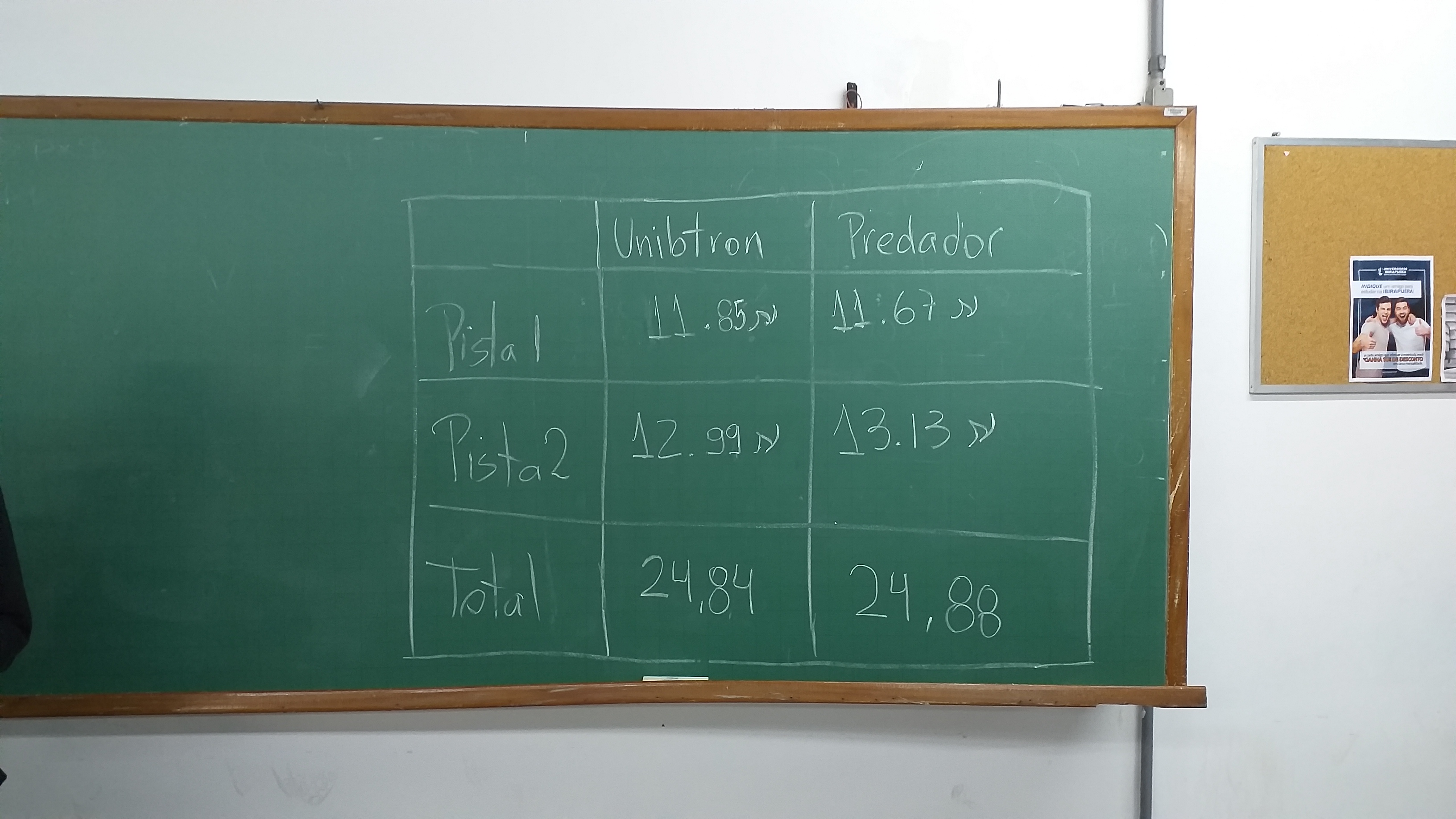
Qual robô saiu vitorioso? E por que ele ganhou?
Ganhamos por quatro centésimos.
O que vocês aprenderam com essa atividade?
Gustavo Barros Esperandino – Estou no segundo semestre e é algo bem diferente para mim. Eu nunca tinha mexido com essa tecnologia, é uma lógica que estou aprendendo agora.
Bruno Almeida Silva – Aprendi muitas coisas no desenvolvimento do site e como trabalhar mais nos projetos, principalmente em como fazer as coisas, pensar um pouquinho antes de comprar um objeto que vai fazer parte do nosso robô para não dar problema depois, o que reduz também os gastos no final do projeto. Enfim, foram muitas experiências.
Leonardo Garruba de Araujo – Eu aprendi bastante com esse projeto, foi de grande valia para nós que estamos no segundo e terceiro semestre. Fiquei muito focado na parte da programação e gostei de ter trabalhado com o arduino, principalmente por ser uma tecnologia que está crescendo. Foi bom termos uma experiência que agrega tanto ao nosso currículo, tenho certeza que vai abrir inúmeras portas para a gente no final do curso.
Vinicius Souza Xavier – Eu aprendi um pouco mais da programação do arduino e como fazer certas peças funcionarem no sistema. Algumas pessoas precisaram ficar buscando peças e não tiveram como trabalhar a parte de programação. Então, o professor disponibilizou todo o conteúdo para quem não conseguiu ajudar nessa parte, para sabermos um pouco mais.
Tales Luis Nascimento dos Santos – Nunca antes tive contato com programação, estou aprendendo agora na faculdade – foi a parte que mais “pegou para mim”. Também gostei de trabalhar em equipe porque cada um ajudou o outro com o que sabia.
Felipe Alves da Silva – A programação foi a parte que mais “pegou” para mim, porque apesar de eu já ter um conhecimento, nunca usei o arduino. Foi um pouco difícil de aprender uma nova linguagem e ter noção de como usar ela.
Marco Antonio Pereira da Silva – Primeira coisa que aprendi foi a ter muita paciência, ainda mais para um projeto desse tamanho que exige uma grande equipe e vontade de aprender coisas diferentes.
Patrícia Villa Nova de Oliveira Pinho – O que tirei de experiência foi lidar com os desafios: aprender a buscar soluções em equipe para resolver os problemas. E depois vem a realização pessoal de observar que, apesar de todos os problemas, o seu robô funcionou… algo que a gente vai levar para a vida inteira. Sem contar que quem seguir pelo caminho da programação vai viver com obstáculos, desafios e a realização de ver aquilo que você trabalhou funcionando e sendo utilizado por outras pessoas. Foi a primeira experiência do que vai vir pela frente na nossa carreira.
Matheus Ferreira de Oliveira – A minha maior dificuldade foi ter paciência. Teve um dia que saímos de casa às 07h00 e voltamos apenas às 20h30. Estávamos com o robô completamente pronto quando tivemos que recomeçar tudo. Tivemos vários problemas, como uma lógica de programação e sensor pararem de funcionar… quando vimos o robô se movimentando foi um momento muito feliz, nunca tive essa experiência, é uma sensação muito boa, gratificante.
Caíque Marques Napoleão da Silva – O maior aprendizado foi a questão do trabalho em equipe: juntar as informações e montar o robô.
Matheus Ferreira de Oliveira – Apesar de saber de programação, nunca tive um contato com o arduino. Aprendi bastante a me frustrar e não desistir. O professor até havia comentado que tínhamos que aprender a errar duas mil vezes para acertar na próxima. E o pior é que ele estava certo, mas eu tinha duvidado naquele momento. Depois de toda a frustração, conseguimos e a sensação foi super gratificante.
E como foi o professor?
O professor orientou a gente em todos os passos. Ele explicava e a gente não colocava fé, mas tudo fez sentido quando fomos para a prática. Não temos o que reclamar das orientações dele.
O que vai acontecer com os robôs? Seria possível utilizá-los novamente?
No momento a UnibTron vai ficar parada. Vamos ficar de olho numa próxima competição para participarmos, expandir nossos conhecimentos nas questões de robótica e programação. Se os membros do grupo quiserem e a instituição apoiar, gostaríamos de participar de competições.
GRUPO PEDRADOR

Quais foram as primeiras etapas da atividade?
Primeiro tivemos que escolher o que comprar. Assim, demos preferência a um kit pronto para não nos preocuparmos em ficar procurando peça por peça, apenas montar e programar. Queríamos também evitar conflitos de hardware físico, porque se você compra em lugares diferentes, pode acontecer de não ser compatível. Comprar um kit fechado evitava esse problema.
Essa decisão tornou o trabalho mais fácil ou mais difícil?
Foi complicado. O nosso não era acoplado com uma plaquinha, por isso tivemos que desenvolver o circuito.
Qual foi o papel de cada membro do grupo?
Matheus Becari – montagem e programação
Tales Luís Nascimento dos Santos – pesquisa para construção do robô
Vinicius Souza Xavier – pesquisa para construção do robô
Jason Glayson Borges Santos – criação do site e auxílio nas pesquisas
Gabriela Rodrigues Lima – banner com o fluxograma da linguagem e auxilio nas pesquisas
Alison Bastos Silvas – responsável pelo site e auxilio nas pesquisas
Gabriely Pereira Argueles – responsável pelo artigo e auxilio nas pesquisas
Henrique Coutinho Vieira Bottaro – peças e montagem
Sandoval Pires da Silva – Responsável pela montagem e programação do robô
Graciely Campos Rosa – pesquisas e apresentação
Vocês tiveram gastos?
Sim. Gastamos entre R$500,00 e R$600,00.
E as pistas? Como elas foram desenvolvidas?
O outro grupo estava sendo orientado pela faixa preta, e nós estávamos nos orientando pela faixa branca, ou seja, nosso sensor lia colorido e não entendia o preto. O preto é neutro, o sinal bate e fica. Colorido, ele bate e retorna. O nosso só entendia o colorido, e o deles só entendia o preto. Então, invertermos e colocamos a nossa leitura como a deles, para ter igualdade.
E como aconteceu a movimentação do robô? Foi no mesmo esquema do outro grupo?
Não, aconteceram muitas modificações. No primeiro comando ele se jogava muito, perdia muito tempo. O professor nos orientou para organizarmos isso. Então, fizemos mais pesquisas e testamos mais três programas. O melhor adaptado foi esse último programa que passou a ser continuo, constante. Passamos uma orientação pelas portas analógicas que nos deu uma leitura mais precisa.
O que vocês aprenderam com essa atividade?
Jason Glayson Borges Santos – Aprendi que vamos sempre errar para chegarmos a excelência.
Gabriela Rodrigues Lima – Aprendi a pesquisar muito, tive a minha primeira experiência com a placa arduino, a linguagem e a programação. Criar o robô foi gratificante e deu uma ideia do que realmente eu quero.
Alison Bastos Silvas – Além de trabalhar em equipe, fiquei responsável pela interface do site e consegui melhorar alguns aspectos da criatividade.
Gabriely Pereira Argueles – Aprendi mais sobre hardware, pois não sabia muito como era a ligação das peças. Também aprendi um pouco mais sobre programação e trabalhar em grupo – às vezes é complicado.
Henrique Coutinho Vieira Bottaro – Uma parte que me atrai bastante é a hardware, aprendi bastante com essas peças. Como grande parte do grupo, aprendi muito com o arduino e a trabalhar em equipe.
Sandoval Pires da Silva – Para mim foi um aprendizado. Eu não tinha uma precisão dessa linguagem de programação, nem montado um circuito antes que de fato funcionou. Aprendi também a sanar problemas com muitas pesquisas, o que vai me ajudar no futuro na empresa em que estarei trabalhando.
Graciely Campos Rosa – O trabalho em grupo foi muito importante, principalmente por eu não falar muito. Pesquisar também foi bastante interessante, só assim temos como seguir adiante. E aprendi também que é preciso errar para chegar lá.
O que vai acontecer com os robôs? Seria possível utilizá-los novamente?
A gente combinou que o robô vai ficar com o Sandoval. Como não tivemos muito tempo para fazer o projeto, queremos mexer na programação e consertar alguns erros.
Confira mais fotos e vídeos abaixo: